|
|
Entries
Feb 17, 2009 16:40:56 GMT -5
Post by Kody on Feb 17, 2009 16:40:56 GMT -5
- PsycloniZer (1) [Andrew Jackson]
- Hex Appeal [Daniel Stickler]
- Spin Dash Unleashed (3) [Steven McGregor]
- Under Pressure [Martijn Benschop]
- Thanatos [Samuel Park]
- Hypertension Mk 3 [Matthew Fowler]
- Nitro-Gene 5.0 [Paul Cuomo]
- Skid [Aaron Knight]
- System Shock 4.0 [Liam Eliot]
- Do Or Die [Chezza/No Wai]
- The Punisher [Lewis Matthews]
- Nidhogg Evo [Joey McConnell]
|
|
|
|
Entries
Feb 17, 2009 16:41:04 GMT -5
Post by Kody on Feb 17, 2009 16:41:04 GMT -5
PsycloniZerShape: Cylindrical with an outer ring like Gyrobot, with three hammers protruding from the ring. Diameter: 700mm (900mm with hammers) Height: 175mm Weight: 100kgs Drive: 2x S28-400 Magmotors run at 24v from 3600mAh NiCad battery packs, which gives about 9hp in the drive. This runs four Aluminium wheels with a Vulkolan tread for grip. Turning Circle: 0mm using a four-wheel drive skid steer system. Speed: 15mph Ground Clearance: 10mm all the way round. Armour: 8mm thick Hardox for the rim and 3.25mm Hardox for the top and bottom armour. The hammers are also constructed out of Hardox. Weapon: A ~35kg spinning ring, like that on Gyrobot with three hammers extending horizontally outwards, supported to each other with a framework. The ring is powered by an LEM200 motor run at 48v and spins at 2500rpm. The ring should be capable of getting up to full speed in less than 3 seconds. This slams huge 80mm3 sharpened lumps of Hardox into the opponents at a force of around 108kJ. Self-righting mechanism: Psycloniser is invertible. Notes: The framework supporting the hammers can also work as an anti-axe or crusher device. Internal components are shock mounted using urethane rubber to protect against its own hits. 
|
|
|
|
Entries
Feb 17, 2009 16:41:14 GMT -5
Post by Kody on Feb 17, 2009 16:41:14 GMT -5
Hex Appeal
Weight: 200kgs
Dimensions (L x W x H): 100cm x 100cm x 30cm
Shape: Cylinder
Colour: The outside of the robot is divided into hexagons which are each different colours
Drive/locomotion: The robot uses a hexapod walking system, which basically has six legs equally spaced around a hexagon type platform inside the machine. These allow it to walk in any direction without turning, making it omni-directional except without the spinning, and thus very maneuvrable.
The legs themselves are triangular tubes of 5mm Hardox with Nylon feet with a thin layer of rubber for some grip on the arena floor, and each leg is powered by two linear actuators - one to pick up and lower the leg and one to move it forwards/backwards, with custom control electronics that drive the actuator motors and control direction of movement.
The actuators themselves are run at 60v from 20kg of NiCad batteries.
Speed: About 4-5mph maximum
Ground clearance: 10mm all around when at rest, the robot is prone to wobbling slightly when moving around so the clearance is likely to be somewhat less at times, so it's still going to hit wedges
Weaponry: The robot has a 61kg spinning shell made from varying thicknesses of Titanium. The shell is 30cm high and 1m in radius. The bottom half of the shell is made from 2cm Ti and the top half is made from 1cm Ti. By doing this, the weight is placed nearer the ground and results in the machine’s centre of gravity being lower. The robot has 2 teeth made from 2cm thick Titanium, positioned on the lower half of the machine, and the entire spinning shell I is made from the same piece of Titanium. The spinner is powered by 2 x Huqsvarna 3120XP chainsaw motor s geared down 20:1, giving a top speed of 1200RPM. According to the Team Cosmos calculator, this should give out a total of 117kJ of power per hit and should reach its top speed within milliseconds.
Armour: The main armoury of the robot is the spinning shell, made from 2cm and 1cm Titanium, the latter being placed on the top half of the spinning shell. The top and bottom panels of the robot are armoured in a sandwich of 6mm Polycarb, on top of 5mm Titanium, on top of 6mm Polycarb. In order to protect the innards from recoil from the attacks, the whole of the inside is protected in shock proofing.
Srimech: Mounted on the top of the machine is a hinged linear actuator-powered arm, running at 60v and powered by the same NiCad batteries that power the legs. The arm itself is made from 4mm Hardox and is 70cm in length.
Youtube Clip of Hexapod -
|
|
|
|
Entries
Feb 17, 2009 16:41:24 GMT -5
Post by Kody on Feb 17, 2009 16:41:24 GMT -5
Spin Dash Unleashed (formerly Metal Sonic Spin Dash) SHAPE- skirted box, with rounded sides and back. COLOUR- dark blue bodywork, with red-and-white striped skirting. WEIGHT- about 100kg DIMENSIONS- 100cm X 75cm X 20cm SPEED- 16mph TURNING CIRCLE- 0mm GROUND CLEARANCE- virtually 0mm all round, 10mm at sides and rear without skirts. ARMOUR- 4mm Hardox MOVEMENT- inner, 6WD POWER- 2 x LEM-130s. These run at 36v and produce approximately 18hp. WEAPONS- A horizontal Pussycat-style saw blade on the front. The blade is mounted on the underbelly ala Code:BLACK and is designed to chew up skirts and wheels. It is powered by an S28-150 Magmotor and runs at 3000rpm. Its 18hp and shape also makes it an excellent battering ram. SRIMECH- invertible. The rounded sides and rear also prevent it getting beached. NOTES- flies Scotland flag. STRENGTHS- excellent traction, fast, tough armour, low weaponry, invertible WEAKNESSES- untested, so-so manoueverability, saw blade less effective upside-down 
|
|
|
|
Entries
Feb 17, 2009 16:41:34 GMT -5
Post by Kody on Feb 17, 2009 16:41:34 GMT -5
Under PressureShape – Please look at the picture, lol. Its basically 2 huge claws with wheels between them. The claws have 2 tips each rather than 1 but this will be explained in the weapons department. Weight – 100 Kilogram Speed – 14 mph Dimensions – 90x150x20 cm Ground Clearance – Zero underneath the lower tips of both claws, quite big otherwise, its essentially an axlebot after all. Power – 2 S28-400 Magmotors at 24 volt. Movement – 2 titanium wheels with strips of rubber glued on them. Turning Circle - Zero Weaponry – A pair of huge claws around a “main body”. The claws contain some of the internals though. They are powered by a Vivoil pump at 3000 PSI powered by a LEM-130 at 36V. The power is transferred through 70 mm (diameter) bore and a 60 mm (diameter) rod. This results in 3.5 tonnes of force at both tips. Now for the actual claws. As the picture tells, each claw has two “tips”; one at the bottom that’s shaped like a wedge and one fine point above that, please notice that when the two “wedges” touch each other due to the claws closing in, some distance between the fine points remains. The deal is that when the claws are activated the opponent is first scooped up by the 2 wedges scraping their way under the main body, thus lifting his wheels off the ground. Next the fine points come in and start piercing their way through the main body. This design cancels out the problem that most horizontal crushers have in that they cant completely dominate an opponent as long as the opponent maintains a level of grip on the surface. Armour – 5 mm titanium for the “main body” (the brown bit between the wheels), 3.5 mm Hardox for everything else (claws, ram, bore, and the bits of metal extended from the claws that go behind the ram to protect it from head-on attacks). Srimech – Invertible, though the weapons isn’t quite as effective when inverted. Strenghts – Powerful horizontal crusher with a twist. 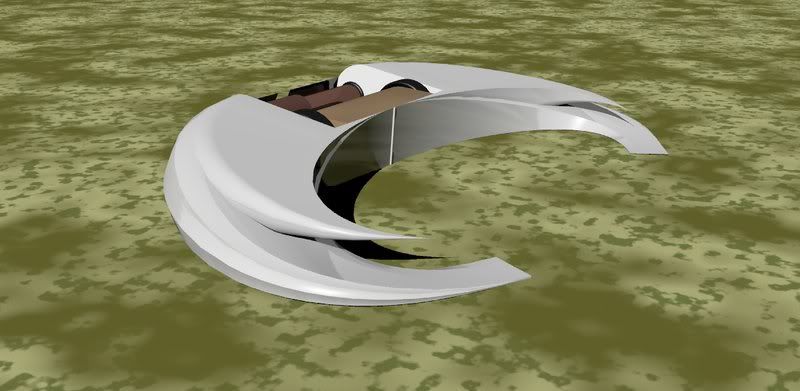
|
|
|
|
Entries
Feb 17, 2009 16:41:43 GMT -5
Post by Kody on Feb 17, 2009 16:41:43 GMT -5
Thanatos
Weight: 100kg
Shape: Think a cylinder, but with sloped sides ala Megabyte
Colour: Blue shell, Black Top, Silver Base, Green Srimech, Red Teeth
Dimensions: 100 X 100 X 25
Power: 2 X Bosch 750's, powered by 4 X 24v NiCad Battlepacks
Wheels: 2 X Urethane Coated Aluminium Wheels
Armour: 6mm Hardox for the shell, 7mm Polycarb for the Base, 4mm Grade 5 Titanium for the srimech.
Top Speed: 11mph
GC: 5mm
TC: Complete Zero
Weapon: 38kg FBS shell, with 4 X 1kg Hardox teeth (2 on the top and 2 on the bottom), all curved to rip into armour, powered by a LEM-170. This can spin at 1500RPM. Heavily Shock-Proofed to protect itself from other attacks.
Srimech: A Linear Actuated Bar at the top, which can right the robot in 1 second.
Strengths: Lethal Weapon, Fast Srimech
Weakness: Weak Base Armour.
|
|
|
|
Entries
Feb 17, 2009 16:41:56 GMT -5
Post by Kody on Feb 17, 2009 16:41:56 GMT -5
Hypertension Mk 3
Weight- 98.4kg
Dimensions- H- 40cm, L– 90cm, W- 70cm
Speed- 17.6mph
Shape- Wedge
Ground Clearance- 0mm at front, 3mm at sides, 4mm at rear
Turning Circle- 0
Armour- 7mm Hardox
Locomotion- 2 x 150mm drilled aluminium wheels with reinforced rubber grips + small front wheels for manouvreability.
Batteries – 20 x CP3600 Nicads at 1.2 v each making 24v and each weighing 80g
Motors- 2 x c40-300 Magmotors running at a gear ratio of 4:1 and producing a total pushing force of 7.64BHp
Failsafe Position- Under the armour at the top of the flipper.
Paint Scheme- See through
Weapons- a CO2 powered flipper running at 750psi with 2 x 70mm bore, 220mm stroke rams behind it with a 2.5kg gas tank. It can flip about 2 tonnes, though that shouldn’t be necessary. It should send a 100kg robot about 1.7m into the air and had around 15 flips in the tank. The idea is that we reserve flips as much as possible and only use them when in prime position.
Srimech- The flipper.
Strengths- Powerful flipper, strong armour, good speed
Weaknesses- Limited manouvreability, limited CO2.
Weight Distribution
Chassis – 22kg
Armour – 35kg
Wheels – 7kg
Batteries – 1.6kg
Motors – 10.8kg
Weaponry – 12kg
Odd Bits (always estimated at 10kg)
Total – 98.4kg
|
|
|
|
Entries
Feb 17, 2009 16:42:05 GMT -5
Post by Kody on Feb 17, 2009 16:42:05 GMT -5
Nitro-Gene 5.0
WEIGHT: 100kg
ARMOUR: 3.25mm monocoque Hardox for the body, with very strong Stainless Steel bolts capped off with rubber to avoid them being broken by spinners. 4mm Hardox flipper. Inside the body, there’s 1cm of Vulkanised rubber on the sides and rear, with 3cm on the front to help fight powerful spinners, and there's also 0.5cm of PU foam covering the motors and flipper rams inside for protection.
SHAPE: Low invertible box with sides and rear angled in a <> shape, with the rear angled >. The front is completely flat, making it useful at hitting into things and bashing. All the lines have been curved over to make it harder for a spinner to grab onto a panel and rip.
MOTORS: 2 x S28-400 MagMotors at 36V = 12HP
LOCOMOTION: 4 Vulkanised Wheels, each is 40mm in width, and they’re also 180mm in diameter.
DIMENSIONS: (L) 85CM (H) 17CM (W) 75CM
COLOUR: Dark Blue all over with the flipper coloured red with the name imblazed on the flipper (running vertically down the robot) in gold writing with a thick silver outline. All the edges of the robot are coloured gold.
WEAPONRY: A full pressure Nitrogen powered flipper at 1000psi, using a single 110mm ram at 1000psi. The flipper is mounted in the middle of the robot, and is 15cm wide and runs 65cm up the body. Using a 5cm long 10mm thick Titanium wedge underneath the flipper, and a heavy flipping arm, the flipper runs completely along the ground. Running on a ratio 2.1:1, the flipper produces 1600kg of force at the tips, allowing me to launch anyone away! This version has enough lift to get a robot of equal size 11-6ft into the air, and throw it 11-6ft along. This version has 1 x 2kg Nitrogen bottle, giving me 15 flips! The flipper has enough power to self-right Nitro-Gene 5.0 in a super stylish 540* somersault!
SPEED: 20mph
GROUND CLEARANCE: 0CM-1CM. At the front, it is completely 0mm. On the skirted sides/rear, its 1cm. 4mm Titanium skirts held on by Hardox hindges are mounted on the sides/rear and join up at the corners, making it harder to get under.
STRENGTH: Pushing power and weaponry.
WEAKNESS: High ground clearance underneath skirts.
|
|
|
|
Entries
Feb 17, 2009 16:42:16 GMT -5
Post by Kody on Feb 17, 2009 16:42:16 GMT -5
Skid
Shape: Lower version of Storm II (angled front and sides)
Speed: 18MPH
Weight: <100kg
Height: 100mm
Length: 600mm
Width: 500mm
Chassis/Armour: 8mm Hardox 500 sides, 3.2mm Hardox 450 Top/Bottom
Drive: 6 x S28-400 Magmotors on 66v (3 motors/side wired in series), driving four 100 diameter, 50mm wide urethane wheels.
Batteries: 5 x 20 Cell A123 Packs producing 66v @ 11.5AH
Notes: Invertible, 10mm ground clearance, except for front wedge which is 0mm, painted black.
|
|
|
|
Entries
Feb 17, 2009 16:42:25 GMT -5
Post by Kody on Feb 17, 2009 16:42:25 GMT -5
System Shock 4.0
Shape: Box wedge with sloped sides, the front wedge is angled at 60* to flip opponents and the sides are angled at 42* to deflect spinners, the front wedge has a 3cm long extension with a Firestorm-style blade, this extension is angled at 30* to get right in underneath opponents, then ram them so they get flipped by the main 60* wedge, it also has a Tornado style angled rear
Weight: 110kg
Length: 80cm (83cm with wedge extension)
Width: 80cm
Height: 15cm
Motivation: 4 x CNC Alumnium internal, but invertible wheels, they have a v-belt groove in the treads and a v-belt between the wheels so they count as tracks, but if they break the robot is not affected at all and the robot simply becomes a wheeled robot, leaving the tracks behind
Drive: 2 x LEM-200s @ 60v
Batteries: 250 C-Cell NiCad batteries
Armour: 4mm hardox monocoque with up to 7mm in key areas
Weaponry:
1) Drive power
2) At the rear there are two diamond tipped ramming spikes, they are placed either side of the angled rear and can push opponents away or damage weaker armours via high pressure nitrogen at 1000psi from a 2kg bottle sideways in the rear of the robot, they should pierce 3mm titanium and weaker and can get about 16 shots, which should be more than enough
3) The front wedge (and the extension) can lift up and down via an S28-150 at 12v. The wedge is hinged in the middle so it can work both ways up. This front wedge is interchangeable for a vertical tornado style 5kg disc with 2 x tungsten blades like Hypno-Disc's, the disc is spun by an S28-150 at 3000rpm, which it can reach in 1.5 seconds and when at that speed it can deliver a 17.8Kj hit. It is 150mm in diameter, 3cm thick and there is 1.5cm distance of rotattion to the centre of the disc, it is made of titanium/vanadium alloy
Speed: Can be pushed to 28mph, but mostly kept lower for more control (about 17mph)
Turning Circle: 0
Ground Clearance: 0 at the front, 10mm the rest of the way around, but that is protected by 5mm titanium hinged skirts at the sides and rear that flop over when the robot is inverted
Srimech: Invertible
Colour: Light blue with the name written in yellow on top
Strengths: Speed and Power
Weaknesses: Some people will be cheesed off by this clear exploitation of the weight advantage given to tracks ;D ;D ;D
|
|
|
|
Entries
Feb 17, 2009 16:42:33 GMT -5
Post by Kody on Feb 17, 2009 16:42:33 GMT -5
Do or DieShape: Simple box-like shape Colour: Black with red streaks along the sides, wheel slots, and a red scoop Speed: 15mph Weight: 100kg Armour: 5mm Hardox, with an 6mm polycarbonate baseplate, and 1cm titanium for the scoop Drive: 2 LEM200s @ 60v Power: 8 NiCad Battlepacks Motivation: 4WD with Urethane Rubber Ground Clearance: 5mm with 0mm under scoop Dimensions: 85cm x 55cm x 20cm Weapons: A lifting scoop powered by a linear actuator, can easily lift its own weight and can move 180 degrees, meaning it works inverted too. Strengths: Speed Weaknesses: Weapon tends not to do enough damage. 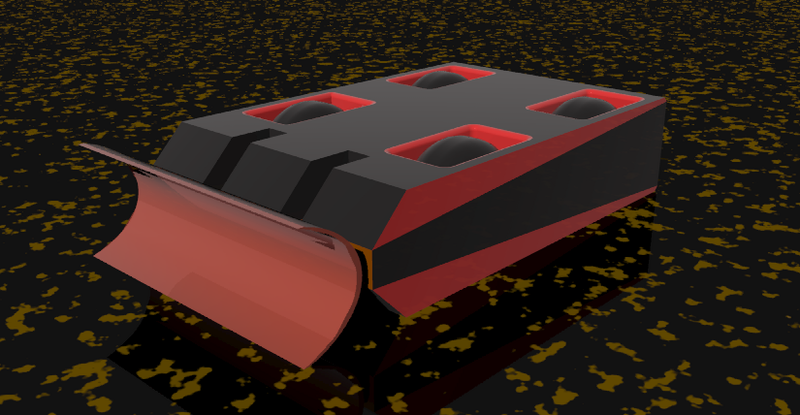
|
|
|
|
Entries
Feb 17, 2009 16:42:41 GMT -5
Post by Kody on Feb 17, 2009 16:42:41 GMT -5
The Punisher
BODY SHAPE: Imagine Bigger Brother without the flipper and a rear wedge
WEIGHT: 95kg
DIMENSIONS (L X W X H): 80cm x 80cm x 25cm
COLOUR: Crimson bodywork and a midnight blue weapon, silver self-righting wings
LOCOMOTION: 2 x internal 150mm diameter wheels with HDPE hubs and vulcanised tyres
GROUND CLEARANCE: 10mm all round, but 0 at the rear
SKIRTS: None
DRIVE MOTORS: 2 x S28-150 magmotors running at 24v
DRIVE BATTERIES: 2 x NiCad battlepacks running at 24v
SPEED: 20mph
TURNING CIRCLE: 0 metres
BODY ARMOUR: 3.2mm hardox all over except for the base, which is 5mm 7075 aircraft aluminium
CHASSIS: Steel Ladder
WEAPON 1: Mounted at an angle on the front wedge there is a Warhead-style spinning upturned bowl, spinning up to a maximum speed of 3000rpm in 3 seconds courtesy of two D-Pack motors at 24v, it weighs a total of 20kg and like Warhead’s can be moved up and down to hit different parts of the opponent via a Bosch 750w motor at 24v, it is made of titanium and has its own teeth curved to rip
WEAPON 2: The rear wedge can allow it to push other robots around
WEAPON BATTERIES: 4 x NiCad battlepacks at 24v in series
SRIMECH: Linear actuated side wings, hined at the bottom of the side of the robot and running across the top until they meet in the middle
STRENGTHS: Powerful weaponry, decent armour
|
|
|
|
Entries
Feb 17, 2009 16:42:51 GMT -5
Post by Kody on Feb 17, 2009 16:42:51 GMT -5
Nidhogg Evo
WEIGHT: 100kgs
DIMENSIONS: 110 x 80 x 30 (with arm raised, 50) cm
SHAPE: The front of the robot is almost the same as the S7 Lightning, with the rear being more rounded
COLOUR: Dark (almost black) red and green with one darkish gold chevron on the front
DRIVE: 2 LEM-130 motors run at 36v from 10kg worth of NiCad batteries, driving two inner Vulkalon tyred wheels located just in front of the robot's centre. This means it turns around its front, rather than other 2wd robots that have the wheels at the back, and makes it easier to point the front (and therefore weapons) where I want them to go. A ball transfer unit in the rear makes maneuvering easier.
SPEED: 15mph average, 20mph max
GROUND CLEARANCE: 0 at the front due to the weapons, varying from 0-10mm elsewhere
ARMOUR: Mostly 3.2mm Hardox, which at the rear is formed into a continuous quarter sphere and used as part of the chassis. The front ramp is 4mm Hardox, along with the weaponry, and the base is 6mm polycarbonate with 2mm grade 5
titanium additional protection in key areas.
WEAPONS: 1) Inside the front ramp (up to about halfway) is a hydraulically powered rear hinged lifting device, which can lift
about a tonne and raises fully in about two seconds.
2) Sticking out of the front wedge is a hydraulically powered crushing arm, which has rounded yet sharp spines on it, tipped
with a hardened tool steel point, running from a hydraulic ram located behind it similar to Executioner, giving about 15 tonnes
of force at the tip of the arm.
The hydraulics are driven from a Vivoil pump running off a S28-400 Magmotor producing 3000psi of pressure.
Also, either side of the front lifter there are Hardox spike/wedges for getting underneath or ramming opponents.
SRIMECH: The top of the robot and the top of the crushing arm have a rollover shape (think M2/Mega Morg) that should
allow it to roll over onto its wheels if it gets tipped over. If for any reason the rolling over doesn't work, like it getting up
against a wall, moving the crushing arm should change the balance enough to allow it to self right.
THEME SONG: "Flesh Into Gear" by CKY
NOTES: Internals are shockproofed to withstand hits from spinners, as most of my robots are. Keeps the LED eyes from the
previous version, but this time mounted through holes in the armour.
STRENGTHS: Good maneuvrability and weapons synergy, original srimech problem sorted
WEAKNESSES: One in seventeen billion chance of the robot spontaneously combusting just before a fight
|
|



