|
|
Post by daliad100 on Apr 24, 2010 10:29:50 GMT -5
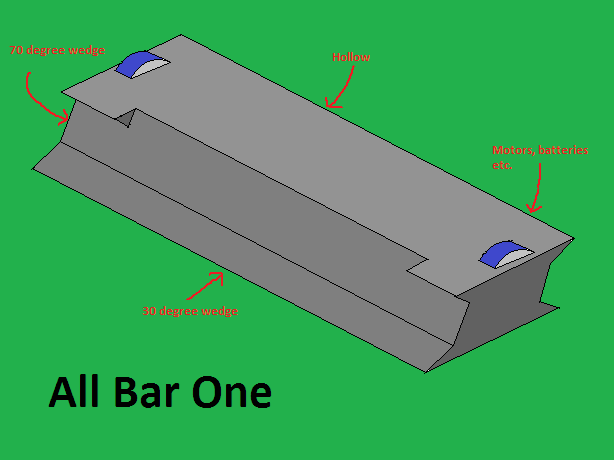 Name: All Bar One Weight: 100 kg Shape: A very wide paralelogram wedge Colour: Battleship Grey Dimensions: 33cm * 110 cm * 14 cm Drive: 2 * LEM 130 (95S) on 49.5 V with 6 * 15 cell A123 ANR26650M1 battery packs Locomotion: 2* 15cm diameter 5cm wide titanium hubbed wheels covered in urethane rubber Armour: 7mm hardox on the wedges, 5mm hardox top and bottom, 10mm hardox on the ends and heavy shock proofing to protect vital components Speed: 29mph Ground Clearance: 0mm at the wedges, varies along the sides to 5mm at the back although technically more due to inverted wedge Turning Circle: 0 cm Weapon: Translational spinner and rammer dishing out 8.4 KJ when top speed ramming While spinning: 18.2 KJ @ 500 rpm 73.1 KJ @ 1000 rpm (now it might kill itself) 164.5 KJ @ 1500 rpm 292.5 KJ @ 2000 rpm Srimech: Invertible Notes: A bar shaped translational spinner that can ram if stopped spinning due to it having two wheel drive. The robots innards are pushed as far as possible to the sides to maximise weight there with the center being hollow. |
|
|
|
Post by daliad100 on Nov 30, 2012 20:55:30 GMT -5
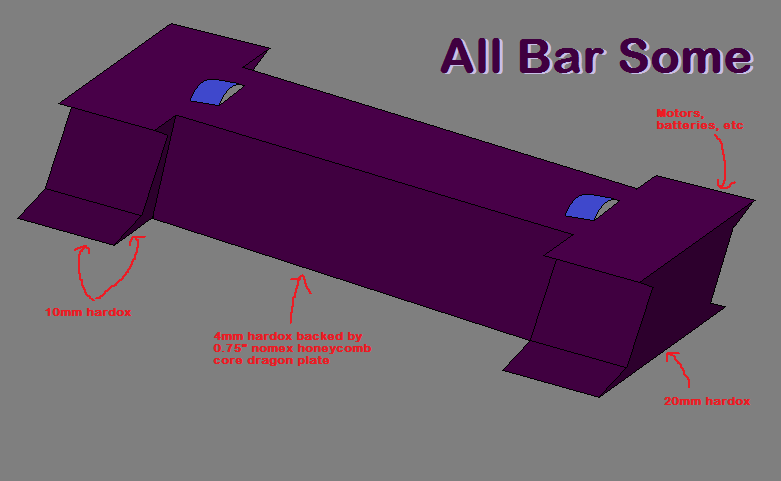 Name: All Bar Some (working title) Weight: 100 kg Shape: A very wide paralelogram wedge Colour: Dark Purple Dimensions: 33cm * 110 cm * 14 cm Drive: 2 * Hacker A200-8 Brushless outrunners with an imaginary magnet retaining ring and added sensors for better speed control response running on 49.5 V with 6 * 15 cell A123 ANR26650M1 battery packs (theoretically LEM-200 powerful in something a little bit bigger than a LEM-130) Locomotion: 2* 15cm diameter 5cm wide titanium hubbed wheels covered in urethane rubber Armour: 20mm hardox on the very ends, 10mm hardox for end wedges and the two inner bulkheads, 4mm hardox top, bottom, front and back main body backed by 3/4" nomex Honeycomb core dragon plate (mostly improves stiffness and adds a bit of strength) and heavy Shock proofing to protect vital components Speed: 30mph Ground Clearance: 0mm at the wedges, varies along the sides to 5mm at the back although technically more due to inverted wedge Turning Circle: 0 cm Weapon: Translational spinner and rammer dishing out 9 KJ when top speed ramming While spinning: Low end estimates (I=15kgm^2, no innards, from cad) 20 KJ @ 500 rpm 82 KJ @ 1000 rpm (suicide range) 185 KJ @ 1500 rpm 329 KJ @ 2000 rpm High end estimates (I = 20kgm^2, modeling innards as point masses) 27kJ @ 500rpm 439kJ @ 2000rpm It can probably go faster due to the wheels being closer together approaching the 1MJ range at 3000rpm but it shouldn't be needed (much ;P) Srimech: Invertible Notes: A bar shaped translational spinner that can ram if stopped spinning due to it having two wheel drive. The robots innards are pushed as far as possible to the sides to maximise weight there with the center being hollow. Just a bit of an upgrade, a bit faster, better weight distribution, wheels pointing in for higher spin speed, purpler-er. |
|


